Section: Software
Development work: Robot vision platforms
Participant : Fabien Spindler [correspondant] .
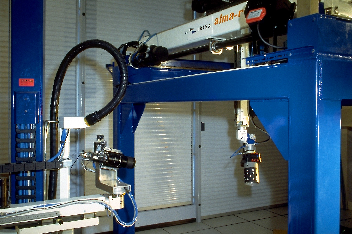
We exploit two industrial robotic systems built by Afma Robots in the nineties to validate our researches in visual servoing and active vision. The first one is a Gantry robot with six degrees of freedom, the other one is a cylindrical robot with four degrees of freedom (see Fig. 2 ). These robots are equipped with cameras. The Gantry robot allows also to embed grippers on its end-effector.
Two papers published by Lagadic in 2012 enclose results validated on this platform. Note that it is also opened to researcher from other labs. For example, this year an associate professor from LSIIT in Strasbourg did experiments on the Gantry robot.